EXTERIOR WALL CLEANING ROBOT (C-BOT)
-
-
Exterior Wall Cleaning Robot (C-BOT)
The Exterior Wall Cleaning Robot (C-BOT) is an exterior wall window cleaning robot that replaces the exterior wall cleaning of high-rise buildings, which is a high-risk task that is carried out manually.
Using a gondola-type BMU, we can do safe work by unmanned exterior wall cleaning of a high-rise building that is 100% manual, and reduce the time required to clean the exterior wall of a high-rise building that takes three months by hand.
Characteristics
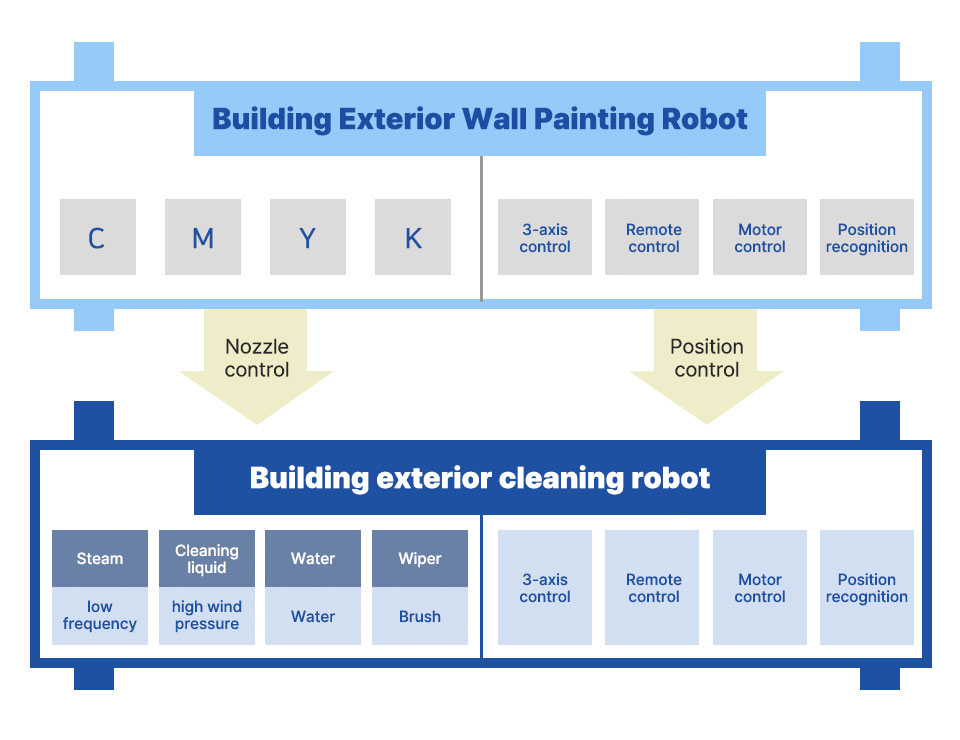
4-Way Cleaning Spray Technology
| 1) Target recognition technology | - Use image recognition technology to determine the status of the target face. |
|---|---|
| 2) Nozzle control technology | - Controls the four injection nozzles according to the condition of the target plane. |
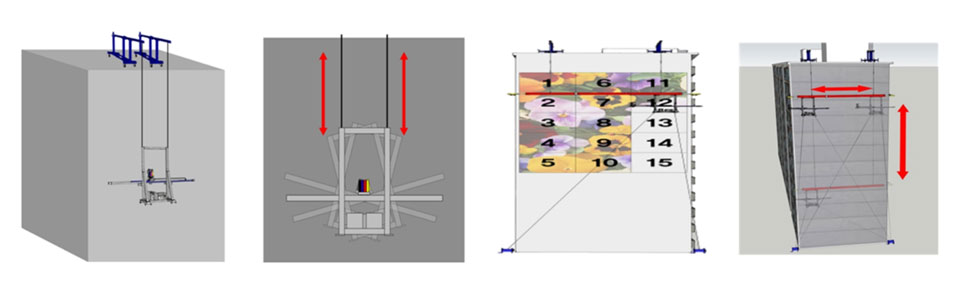
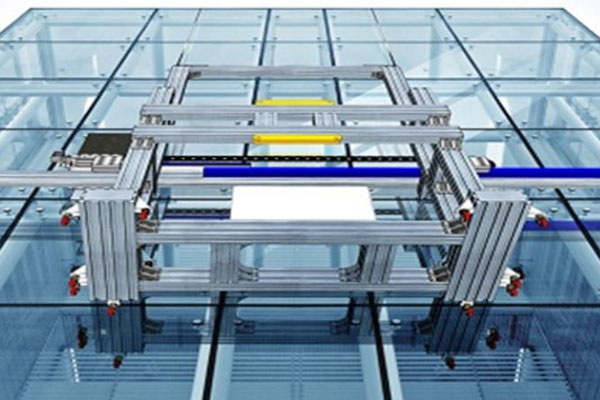
| 3) Position control mechanism | - Applies a three-axis position control mechanism by considering the flexibility of the target plane together. |
Vertical and horizontal position control technology
- Vacuum or magnetic attachment alone cannot maintain attachment on the exterior walls of a skyscraper.
- The RP's exterior wall cleaning robot uses the vertical/horizontal transfer device of the mural painting robot to control the movement of the cleaning robot.